




ГЕНЕЗИС ПЛЮС
Железногорск, Красноярский край, Россия
ГЕНЕЗИС ПЛЮС
Железногорск, Красноярский край, Россия
ГЕНЕЗИС ПЛЮС
Красноярский край, Россия
ГЕНЕЗИС ПЛЮС
Красноярский край, Россия
ГЕНЕЗИС ПЛЮС
Красноярский край, Россия
УДК 656.073.235 Контейнерные перевозки
УДК 614.8.084 Предотвращение несчастных случаев. Защита и безопасность
В статье рассматривается проблема повышения эффективности управления аварийно-спасательными работами в условиях чрезвычайных ситуаций за счет применения беспилотных авиационных систем для доставки специализированных контейнеров. Актуальность работы обусловлена высокой долей летальных исходов (до 68 %), связанных с запаздыванием помощи более чем на 40 минут. Целью исследования является формализация и разработка алгоритмов физического и информационного взаимодействия элементов системы «пункт управления – беспилотное воздушное судно – интеллектуальный аварийный контейнер». Объектом исследования выступают процессы управления логистикой первой помощи в зоне ЧС. В работе применены методы системного анализа и функционального моделирования (IDEF0), позволившие представить процесс доставки как совокупность взаимосвязанных управленческих процедур. Научная новизна заключается в разработке формализованной модели, которая рассматривает контейнер не как пассивный груз, а как активный узел системы управления, способный ретранслировать данные и выступать в роли навигационного маяка. В результате исследования разработаны иерархические алгоритмы (декомпозиция А1-А4), регламентирующие последовательность действий от момента получения сигнала о ЧС до подтверждения факта доставки помощи. Проведена количественная оценка зависимости времени полета от массы полезной нагрузки и обоснован выбор оптимальной конфигурации для различных типов ЧС. Практическая значимость работы состоит в создании методологической основы для внедрения роботизированных средств в контур управления Единой государственной системы предупреждения и ликвидации ЧС, что позволит сократить время реакции на 25-30% и минимизировать риски для личного состава.
управление в чрезвычайных ситуациях, аварийный контейнер, беспилотные авиационные системы, алгоритмы взаимодействия, функциональное моделирование, логистика первой помощи, РСЧС, грузоподъемность БАС, энергоэффективность
Алгоритмы физического и информационного взаимодействия при использовании аварийных контейнеров первой помощи и жизнеобеспечения при ЧС
Введение
Современные тенденции роста числа и масштабов чрезвычайных ситуаций (далее – ЧС) природного и техногенного характера предъявляют повышенные требования к оперативности и эффективности управления силами и средствами ликвидации их последствий. Критическим фактором, определяющим успех спасательной операции, является время доставки первой помощи пострадавшим. Согласно данным МЧС России, более 68 % погибших при ЧС связаны с запаздыванием помощи свыше 40 минут [1]. Традиционные способы логистики, такие как автомобильный транспорт или пилотируемая авиация, зачастую оказываются неэффективными из-за разрушения инфраструктуры, труднодоступности местности или высокой опасности для спасателей.
Перспективным направлением решения данной проблемы является интеграция беспилотных авиационных систем (далее – БАС) в контур управления аварийно-спасательными и другими неотложными работами (далее – АСДНР). Однако существующие технические решения, представленные на рынке (Zipline, DJI FlyCart 30 и др.), имеют ряд системных недостатков: они ориентированы на гражданские задачи, зависят от импортных комплектующих и, что наиболее важно, не рассматривают транспортируемый контейнер как часть единой информационно-управляющей системы [1]. Контейнер остается пассивным грузом, что создает технологический разрыв между этапами отправки, доставки и подтверждения получения помощи.
Обзор современных научных публикаций [5-7] показывает, что основное внимание уделяется либо навигационным задачам, либо оптимизации маршрутов, в то время как вопросы киберфизической интеграции элемента доставки в общий контур управления ЧС исследованы недостаточно.
Таким образом, возникает научно-техническая задача, заключающаяся в необходимости разработки формализованных алгоритмов физического и информационного взаимодействия всех элементов системы доставки (пункт управления, БАС, контейнер), что позволит обеспечить сквозное управление процессом и повысить его надежность в условиях неопределенности и дефицита времени.
Целью настоящей статьи является формализация и описание алгоритмов функционирования системы доставки аварийных контейнеров первой помощи и жизнеобеспечения с использованием БАС, а также количественная оценка технических ограничений, влияющих на эффективность управления в условиях ЧС.
Материалы и методы
Для достижения поставленной цели использовались материалы научно-технического отчета по первому этапу НИОКТР «Разработка аварийных контейнеров первой помощи и жизнеобеспечения и способов их доставки с применением БАС». Теоретической базой послужили положения системного анализа, теория управления организационными системами, а также нормативно-правовые акты, регламентирующие деятельность РСЧС: Федеральный закон № 68-ФЗ [2], Постановление Правительства РФ № 794 [3] и ГОСТ Р 22.8.01-2021 [4].
Основным методом исследования выбрано функциональное моделирование с использованием нотации IDEF0 (Integrated Definition for Function Modeling). Данный метод позволяет представить исследуемую систему (процесс доставки контейнера) в виде иерархической совокупности взаимосвязанных функций (блоков), на входы и выходы которых воздействуют потоки информации (управление) и ресурсов (механизмы). Это дает возможность наглядно отобразить как физическое перемещение объекта, так и информационные связи, сопровождающие этот процесс на каждом этапе.
Для количественной оценки технических ограничений применялись методы сравнительного анализа и математической статистики при обработке данных о грузоподъемности и времени полета 15 коммерческих и опытных образцов БАС. Расчет энергопотребления бортовой электроники контейнера производился на основе паспортных данных отечественных компонентов (NV08C-CSM, модули NB-Fi, микроконтроллер К1986ВЕ92QI).
Результаты
В ходе исследования была разработана иерархическая функциональная модель процесса доставки аварийного контейнера (Рис.1 и 2). Контекстная диаграмма (А0) представляет собой обобщенное описание цели: доставить контейнер пострадавшему в зоне ЧС. Входами процесса являются сигнал о ЧС (заявка на помощь) и комплект контейнеров на складе. Выходами – доставленный и активированный контейнер, а также подтверждение операции в пункте управления. Управление процессом осуществляется на основе решений руководителя ликвидации ЧС (далее – РЛЧС), нормативных документов и данных разведки. Механизмами выступают оперативный персонал, БАС, средства связи и само оборудование контейнера.
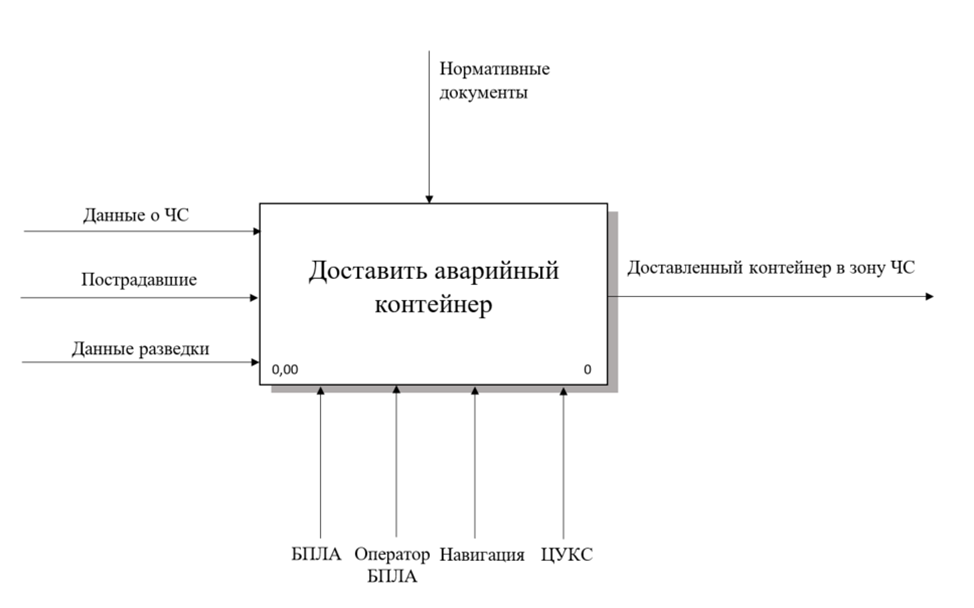
Рис.1. Декомпозиция А0 «Доставить аварийный контейнер»
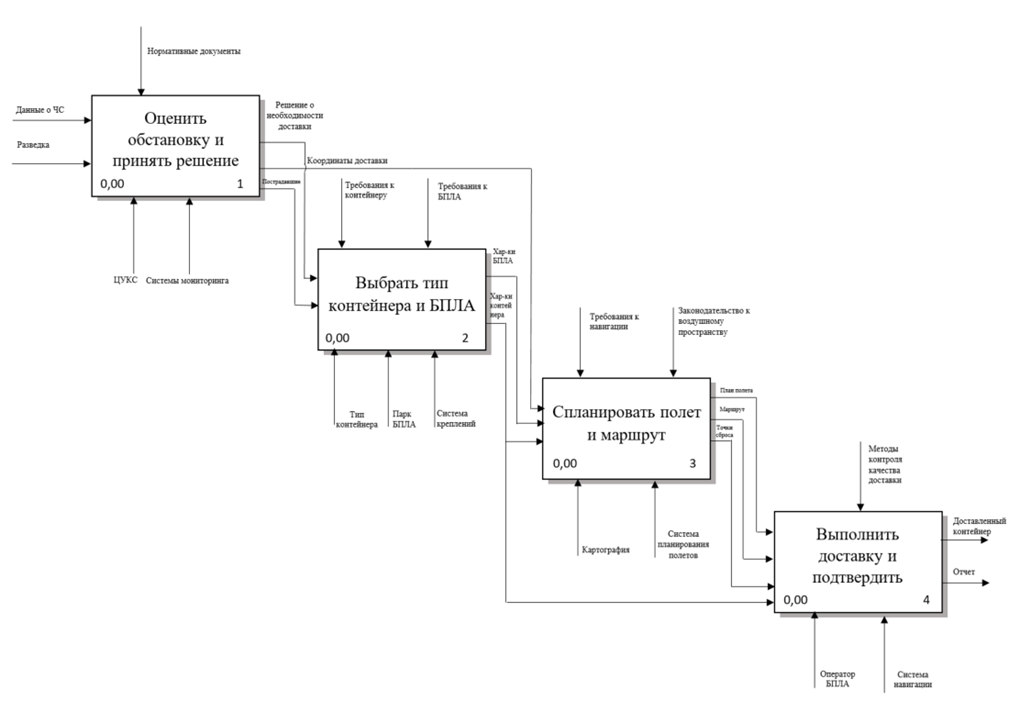
Рис.2 Действия, необходимые для выполнения декомпозиции А0
Декомпозиция первого уровня (А1 «Оценить обстановку и принять решение», Рис.3) раскрывает начальный, наиболее ответственный этап. Он включает функции сбора данных с помощью разведывательных БАС, автоматизированного анализа угроз и классификации пострадавших с использованием технологий компьютерного зрения. Результатом этого этапа является сформированное решение о применении конкретного типа контейнера (медицинского, пожарного, гидроконтейнера и т.д.) и назначении приоритетов доставки. Здесь впервые в алгоритм закладывается принцип адресности и приоритетации на основе объективных данных (тяжесть состояния пострадавшего), что реализует функцию «управления» на тактическом уровне.
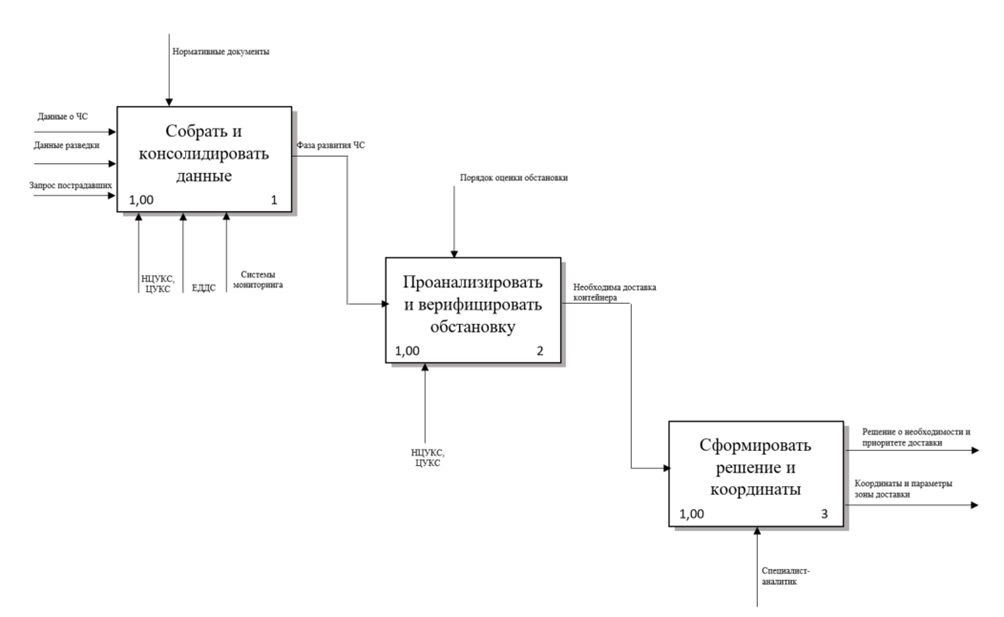
Рис.3. Декомпозиция первого уровня А1 «Оценить обстановку и принять решение»
На этапе А2 «Выбрать тип контейнера и БАС» происходит сопряжение тактической задачи с техническими возможностями. В зависимости от массы контейнера и удаленности зоны ЧС, система выбирает тип носителя.
Для обеспечения научной обоснованности выбора типа БАС был проведен анализ зависимости времени полета от массы полезной нагрузки. Результаты анализа 13 моделей мультироторных БАС представлены в Табл.1.
Табл.1. Зависимости времени полета от грузоподъемности актуальных БАС
|
№ п/п |
Модель |
Грузоподъёмность |
Время полета/дальность полета |
|
1 |
DJI Matrice 350 RTK (6 винтов) |
до 2,7 кг |
до 27 мин (с полной нагрузкой) |
|
2 |
Freefly Systems Alta 6 |
до 3,5 кг |
до 20 мин (с полной нагрузкой) |
|
3 |
DJI MATRICE 100 |
до 3,6 кг |
до 13-17 мин |
|
4 |
Commander 3 XL Hybrid |
до 4,4 кг |
до 3 часов |
|
5 |
AirTruck (ACSL, Япония) |
до 5,0 кг |
35 мин (с максимальной нагрузкой и 4-мя батареями) |
|
6 |
Wingcopter 198 (с фиксированным крылом и вертикальным взлётом) |
до 5,0 кг |
до 40 мин |
|
7 |
DJI Matrice 600 (6 винтов) |
до 5,5 кг |
до 18 мин |
|
8 |
DJI Matrice 600 Pro |
до 6 кг |
до 16 мин |
|
9 |
DJI S900 Spreading Wings |
до 6,8 кг |
до 18 мин |
|
10 |
Vulcan RAVEN Super Heavy |
до 8 кг |
до 20 мин |
|
11 |
FreeFly Alta 8 |
до 9 кг |
10-12 мин |
|
12 |
Draganfly Commander 3 XL |
до 10 кг |
до 22 мин (при полной загрузке) |
|
13 |
Freefly Alta X (8 винтов) |
до 13,6 кг |
8-12 мин |
|
14 |
DJI FlyCart 30 |
30 кг |
18 мин (режим с двумя батареями) |
Анализ данных показывает устойчивую обратную корреляцию (коэффициент корреляции Пирсона r = -0.92). Аппроксимация зависимости описывается степенной функцией вида (формула):
где, T – время полета (мин),
m – масса полезной нагрузки (кг).
Полученная формула позволяет прогнозировать тактический радиус действия системы при планировании операции. Например, для доставки среднего контейнера (10 кг) расчетное время полета составит ~18 мин, что соответствует дальности 9-12 км при крейсерской скорости 10 м/с.
Для реализации функций активного сетевого узла контейнер оснащается бортовой электроникой. Сравнительный анализ модульной и интегрированной компоновки (Табл.2) показал преимущество последней.
Табл.2. Сравнение массогабаритных показателей бортовой электроники
|
Параметр |
Модульная сборка |
Интегрированная плата |
Эффект |
|
Масса электроники, г |
~37 |
~23 |
Снижение на 38% |
|
Объем, см³ |
144 |
48 |
Снижение в 3 раза |
|
Масса с АКБ 18650, г |
~95 |
~70 |
Снижение на 26% |
Расчет энергопотребления в активном режиме (передача телеметрии раз в 15 минут) и режиме «маяка» (ожидание) показал, что автономность контейнера при использовании литиевого аккумулятора емкостью 3000 мА·ч составляет не менее 120 часов. Это удовлетворяет требованиям к проведению поисково-спасательных работ в течение 5 суток.
Центральным звеном модели является этап А4 «Выполнить доставку и подтвердить». Декомпозиция этого этапа (Рис.4) иллюстрирует ключевую особенность предложенной концепции – превращение контейнера из пассивного груза в активный сетевой узел.
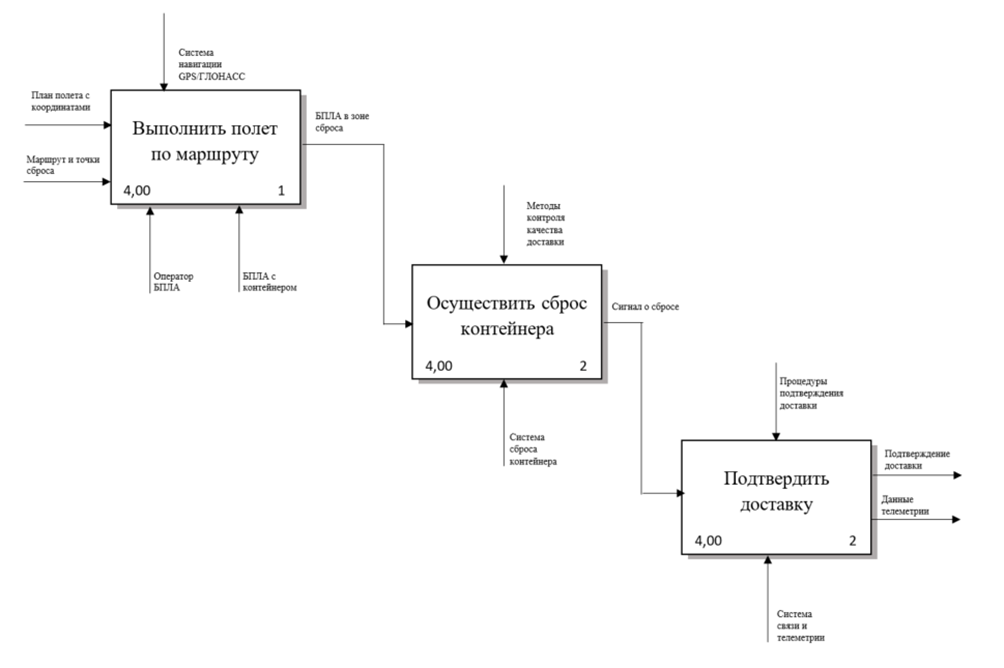
Рис.4. Декомпозиция третьего уровня А4 «Выполнить доставку и подтвердить»
После сброса или посадки, контейнер автоматически активирует бортовые системы: модули LPWAN (NB-Fi по ГОСТ Р 70036-2022 [8]) для передачи телеметрии на пункт управления, UWB-маяк для высокоточного позиционирования, а также входит в локальную mesh-сеть связи, выступая ретранслятором для других устройств и пострадавших. Факт доставки подтверждается не только визуальным контролем с камеры дрона, но и телеметрическим пакетом от самого контейнера, содержащим его GPS-координаты и показания датчика удара. Алгоритм также предусматривает возможность обратной связи от пострадавшего через ручную активацию SOS-сигнала или подтверждение получения через простой интерфейс (кнопка/QR-код).
Обсуждение
Разработанные алгоритмы отличаются от известных решений (например, системы Zipline [9]) тем, что они не ограничиваются логистической задачей «точка-точка», а встраивают процесс доставки в общий контур управления ликвидацией ЧС. Рассмотрение контейнера как интеллектуального агента, генерирующего управляющую информацию (телеметрию, сигналы бедствия), позволяет замкнуть контур обратной связи. Это дает РЛЧС возможность не просто отправить груз, но и достоверно знать, что он доставлен, не вскрыт несанкционированно, а также использовать доставленные контейнеры для расширения зоны покрытия связью.
Предложенная многоуровневая архитектура иерархии управления (пункт управления – БАС – контейнер) соответствует принципам построения современных распределенных систем и может быть интегрирована в существующую инфраструктуру центров управления в кризисных ситуациях. Алгоритмы учитывают возможные отказы и помехи, предусматривая, например, использование инерциальной навигации (VIO) при пропадании сигнала GNSS [10] или работу LPWAN-канала как основного для передачи телеметрии в условиях отсутствия сотовой связи [1].
Полученные количественные оценки (Табл.1, формула) позволяют перейти от качественных рекомендаций к конкретным тактико-техническим заданиям. Например, при ликвидации последствий наводнения (доставка гидроконтейнеров массой 3-4 кг) целесообразно использовать легкие мультикоптеры с радиусом действия до 10 км. При землетрясениях, где требуется доставка тяжелого спасательного инструмента (массой 20-25 кг), необходимо применение тяжелых платформ, даже с учетом меньшего времени полета, так как приоритетом является возможность доставить груз, а не дальность.
Верификация предложенных моделей проводилась путем их сопоставления с реальными кейсами применения дронов (землетрясение в Турции 2023 г., доставка вакцин, лесные пожары) [1; 11]. Анализ показал, что внедрение формализованных алгоритмов и предварительный количественный расчет могли бы сократить время на принятие решений на 25-30% за счет автоматизации рутинных операций по выбору типа груза и носителя.
Заключение
В результате проведенного исследования разработаны формализованные алгоритмы физического и информационного взаимодействия для системы доставки аварийных контейнеров с применением БАС. Ключевой научный результат заключается в обосновании нового подхода, при котором контейнер рассматривается как активный элемент контура управления, что позволяет перейти от односторонней логистики к двустороннему информационному обмену в системе «спасатель-пострадавший».
Проведенные количественные расчеты позволили:
1. Установить степенную зависимость времени полета от массы груза (формула 1), что может быть использовано для оперативного планирования.
2. Доказать преимущество интегрированной компоновки электроники контейнера, обеспечивающей снижение массы на 26% и объема в 3 раза.
3. Обосновать выбор типа БАС в зависимости от сценария ЧС на основе рассчитанных тактико-технических характеристик.
Практическая значимость работы состоит в создании методологической базы для проектирования интегрированных роботизированных комплексов МЧС России. Предложенные алгоритмы могут быть использованы при разработке технического задания на опытно-конструкторские работы по созданию отечественных аварийных контейнеров [12, 13], а также при модернизации программного обеспечения пунктов управления для поддержки принятия решений. Дальнейшие исследования должны быть направлены на натурные испытания предложенных алгоритмов и оценку их эффективности в условиях, приближенных к реальным [14, 15].
Благодарности
Исследование выполнено при финансовой поддержке Красноярского фонда науки (грант №20250429-09227) и индустриального партнёра ООО «КЛЕВЕР».
1. Научно-технический отчет «Разработка способов и сценариев применения аварийных контейнеров первой помощи и жизнеобеспечения в труднодоступной местности при возникновении чрезвычайных ситуаций» (1 этап НИОКТР). Красноярск: ООО «Генезис плюс», 2026. 169 с.
2. О защите населения и территорий от чрезвычайных ситуаций природного и техногенного характера: федер. закон от 21.12.1994 № 68-ФЗ. Доступ из справ.-правовой системы «КонсультантПлюс».
3. О единой государственной системе предупреждения и ликвидации чрезвычайных ситуаций: постановление Правительства РФ от 30.12.2003 № 794. Доступ из справ.-правовой системы «КонсультантПлюс».
4. ГОСТ Р 22.8.01-2021. Безопасность в чрезвычайных ситуациях. Ликвидация чрезвычайных ситуаций. Общие требования. М.: Российский институт стандартизации, 2021. 12 с.
5. Викторович С. Е. и др. Обзор беспилотных авиационных систем доставки грузов // Сибирский аэрокосмический журнал. 2025. Т. 26, № 2. С. 264--290. DOI: https://doi.org/10.31772/2712-8970-2025-26-2-264-290; EDN: https://elibrary.ru/ZRCXIP
6. Васильевич П. Л., Андреевич Г. С., Игоревич П. В. О возможностях и значении беспилотных летательных аппаратов для догоспитального этапа медицинской помощи // Журнал им. Н. В. Склифосовского «Неотложная медицинская помощь». 2024. Т. 13, № 3. С. 501--513. DOI: https://doi.org/10.23934/2223-9022-2024-13-3-501-513; EDN: https://elibrary.ru/FHOJQU
7. Jeong H. young. HYBRID DELIVERY SYSTEM: DELIVERY SCHEDULE OPTIMIZATION AND COMPARATIVE ANALYSIS: thesis. Purdue University Graduate School, 2022.
8. ГОСТ Р 70036-2022. Информационные технологии. Интернет вещей. Протокол беспроводной передачи данных NB-Fi. М.: Российский институт стандартизации, 2022. 28 с.
9. Zipline Drone Delivery & Logistics [Электронный ресурс]. URL: https://www.zipline.com/ (дата обращения: 15.03.2026).
10. A Review Of Visual Inertial Odometry For Object Tracking And Measurement [Электронный ресурс]. URL: https://www.academia.edu/128666140/A_Review_Of_Visual_Inertial_Odometry_For_Object_Tracking_And_Measurement (дата обращения: 07.01.2026).
11. Daily E. Турция задействовала боевые дроны над зоной землетрясения [Электронный ресурс] // Дзен | Статьи. URL: https://dzen.ru/a/Y-sia3lPW2PpIFRh (дата обращения: 07.01.2026).
12. Ефимов А. Р. и др. Adapter and system for arrangement and delivery of cargo by unmanned aerial vehicles: пат. RU2739508C1 USA. 2020.
13. Сизиков С. Н. и др. Термоконтейнер для доставки биопроб малоразмерными беспилотными летательными аппаратами: пат. RU204795U1 USA. 2021.
14. Seidakhmetov A., Valilai O. F. Drone based delivery system: Restrictions and limitations // Proceedings of the Hamburg International Conference of Logistics (HICL). Berlin: epubli GmbH, 2022. С. 351--373.
15. Horelik N. E. и др. Spatiotemporal analysis for emergency response: пат. US20220014895A1 USA. 2022.